|
Die Bezeichnung Exerciser kommt aus der Großrechner
Technik, das waren in früheren Zeiten große Koffer mit jeder Menge
Schalter, mit denen man das Geschehen auf den Großrechner Steuerkanälen
von Hand bestimmte Abläufe durchspielen konnte um Fehler zu
lokalisieren. Denn es gab Zeiten da wurden nicht nur Boards getauscht
in den Rechnern sondern auch Boards direkt vor Ort repariert. Dazu
brauchte man den Exerciser um dem Fehler auf die Spur zu kommen.
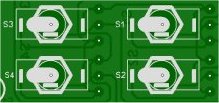
Diese Schaltung knüpft nun an diese Arbeitsweise an. Man kann von Hand alle Ereignisse an der CNC Steuerung durchspielen. Interface Als erstes stellt man entsprechend der Pinbelegung der CNC Steuerung, mittels Drahtbrücken, die benötigen Verbindungen her. Hier wird die Beschreibung der CNC Steuerung benötigt die die Belegung der einzelnen Signale dokumentiert. 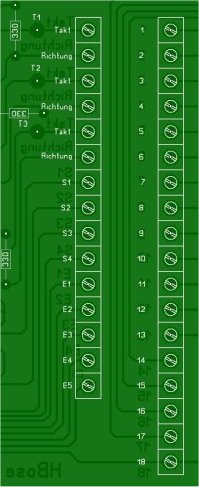 Hier ein paar Beispiel Belegungen CNC-Profi 1 Ausgang Kühlmittel, Schaltausgang 2 Ausgang Takt X-Achse 3 Ausgang Richtung X-Achse 4 Ausgang Takt Y-Achse 5 Ausgang Richtung Y-Achse 6 Ausgang Takt Z-Achse 7 Ausgang Richtung Z-Achse 8 Ausgang Takt 4. Achse 9 Ausgang Richtung 4. Achse 10 Eingang Referenzschalter Z-Achse 11 Eingang Not-Stop 12 Eingang Referenzschalter Y-Achse 13 Eingang Referenzschalter X-Achse 14 Ausgang Reset oder +5V 15 Eingang Referenzschalter 4. Achse oder Längen/Kantentaster 16 Ausgang Stromabsenkung 17 Ausgang Spindel Schaltausgang 18-25 Masse Ostermann Universalinterface 1 Ausgang Spindel, Schaltausgang 2 Ausgang Richtung X-Achse 3 Ausgang Takt X-Achse 4 Ausgang Richtung Y-Achse 5 Ausgang Takt Y-Achse 6 Ausgang Richtung Z-Achse 7 Ausgang Takt Z-Achse 8 Ausgang Richtung 4. Achse oder Sicherheitsfunktion 9 Ausgang Takt 4. Achse oder Analog-PWM 10 Eingang Referenzschalter Z-Achse 11 Eingang Not-Stop 12 Eingang Referenzschalter Y-Achse 13 Eingang Referenzschalter X-Achse 14 Ausgang Kühlmitel Schaltausgang 15 Eingang Referenzschalter 4. Achse 16 Ausgang Sicherheitsfunktion oder Analog-PWM 17 Ausgang Stromabsenkung 18-25 Masse FPLUS/PcDreh im Modus "MS400" 1 Ausgang Stromabsenkung (HIGH) 2 Ausgang Takt X-Achse 3 Ausgang Richtung X-Achse 4 Ausgang Takt Y-Achse 5 Ausgang Richtung Y-Achse 6 Ausgang Takt Z-Achse 7 Ausgang Richtung Z-Achse 8 Ausgang Takt 4. Achse 9 Ausgang Richtung 4. Achse 10 Eingang Referenzschalter X-Achse 11 Eingang Dongle-Rückmeldung 12 Eingang Referenzschalter Y-Achse 13 Eingang Referenzschalter Z-Achse 14 Ausgang - 15 Eingang Referenzschalter 4. Achse 16 Ausgang - 17 Ausgang - 18-25 Masse Stromversorgung Als nächstes muss eine Stromversorgung an den Exerciser angeschlossen werden. Das können 3 x 1,5V Batterien sein oder ein Labor oder Steckernetzteil mit 5V und ca. 120mA.  Nach diesen Vorbereitungen kann man loslegen und die Steuerung oder auch die angeschlossene Fräse direkt testen. Bedienung Mit den 3 Richtungs Kippschaltern kann die Drehrichtung der Schrittmotoren bestimmt werden. Die direkt daneben liegenden Taster setzen die Motoren mittels eines einstellbaren Taktes in Bewegung. 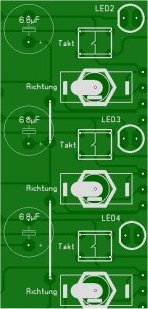 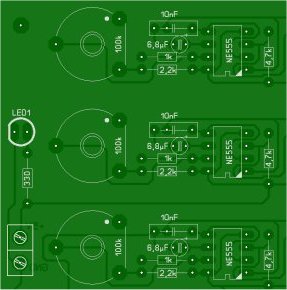 Die Schalter S1 - S4 dienen dazu angeschlossene
Hilfsaggregate anzusteuern. Die da wären Spindeln, Kühlwasserpumpen,
Absaugvorrichtungen usw. Das hilft beim aufspüren von
Verdrahtungsfehlern und sonstiger Gemeinheiten.
 Die LEDs E1 - E4 zeigen den Status von Referenzschaltern, Notaus Pilzen usw. an. Auch das ist sehr Hilfreich bei der Fehlersuche. 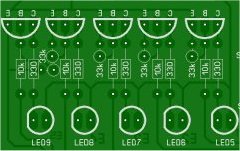 |