| In
der letzten Zeit erhalte ich immer wieder Anfragen nach einer Steuerung
mit der man alte Wickelmaschinen "wieder beleben" kann.
Der Grund sind die defekten mechanischen Windungszähler und die
defekten Linearvorschübe (Getriebe), die sich nicht mehr instandsetzen
lassen. Da der Rest der Maschinen meist extrem robust aufgebaut ist
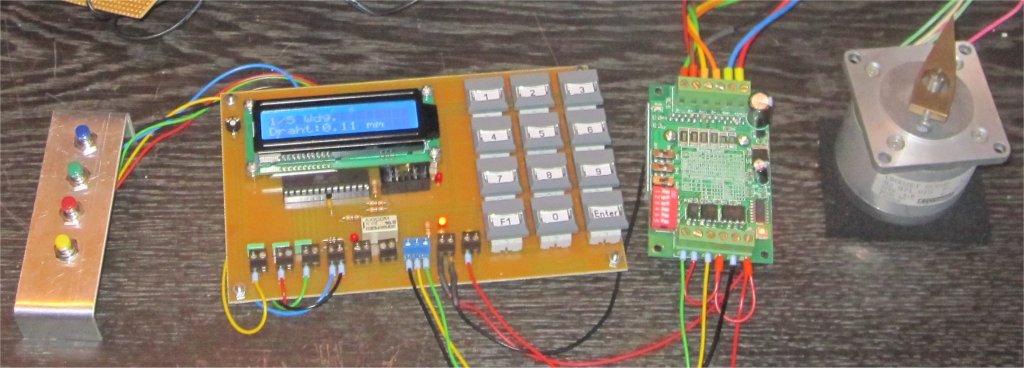
lohnt ein Umbau auf eine elektronische Steuerung auf jeden Fall. Die Steuerung ist auch zum Betrieb einer eigenen Mechanik geeignet, wie z.B. diese hier : Projekt Trafowickelmaschine Die nachfolgend vorgestellte Steuerung geht davon aus das die Achse des Linearvorschubes auf Schrittmotor-Antrieb umgebaut wird und der Antrieb des Wickelmotors über das Relais der Steuerung geschaltet wird. Das obige Bild zeigt den Versuchsaufbau den ich zur SW Entwicklung benötigte. Links die Taster dienten zur Simulation der beiden Endschalter des Linearantriebes, der Startschalter und der Schalter zum Umdrehungen zählen. In der Mitte liegt die eigentliche Steuerung mit Display und Tastatur. Rechts dann die Schrittmotorendstufe (billig Endstufe aus China) mit einem Schrittmotor. Folgende Funktionen erfüllt die Steuerung: - Eingabe der Auflösung des Linearantriebes. - Eingabe der Pulsweite des Schrittmotor Taktes. - Eingabe der Drahtstärke. - Eingabe der Windungszahlen. - Anzeige der IST-Windungszahl. - Anzeige der SOLL-Windungszahl. - Abspeichern aller Werte im EEPROM, damit sie erhalten bleiben nach dem Abschalten. - Tastatur zum eingeben der Werte und zum steuern der Funktionen. - Starten des Wickelmotors ohne Bewegung des Linearantriebes. - Anfahren des rechten und linken Endschalters des Linearantriebes. - Einzelschritt des Linearantriebes nach rechts oder links. - Start des Wickelvorganges mittels externem Schalter. Die Steuerung funktioniert wie folgt: Nachdem einschalten werden IST und SOLL Windungszahl und die eingestellt Drahtstärke angezeigt. Wird der Prozessor erstmalig eingeschaltet sitzen alle Werte auf Null und müssen zu erst über die Tastatur eingestellt werden. Folgende Funktionen sind über die Tastatur erreichbar:
Die Eingänge der Steuerung sind TTL kompatibel und mit Prozessor internen 10k Widerständen auf +5V gelegt. Die Schalter müssen gegen GND schalten. Der Schalter für den Drehimpuls kann als mechanischer Schalter oder als elektronischer Schalter ausgeführt werden. Die Elektronik der elektronischen Schalter müssen gegen GND schalten. Nach jedem Drehimpuls wird der Linearantrieb um eine Drahtstärke bewegt. Die Richtungsumkehr erfolgt automatisch wenn einer der Endschalter erreicht wird.  |